全國(guó)咨詢熱線:
全國(guó)咨詢熱線:
在工業(yè)生產(chǎn)中,繞包機(jī)作為一種重要的設(shè)備,其設(shè)計(jì)報(bào)告的編寫對(duì)于展示設(shè)計(jì)思路、驗(yàn)證設(shè)備性能以及指導(dǎo)后續(xù)的生產(chǎn)和使用都有著極為關(guān)鍵的意義。一份優(yōu)秀的繞包機(jī)設(shè)計(jì)報(bào)告模板應(yīng)當(dāng)結(jié)構(gòu)清晰、內(nèi)容詳實(shí)、表達(dá)準(zhǔn)確,以下將詳細(xì)闡述如何寫好這份報(bào)告模板。
報(bào)告封面需包含項(xiàng)目名稱、設(shè)計(jì)單位、設(shè)計(jì)團(tuán)隊(duì)或人員姓名、完成日期等基本信息,確保一目了然,為報(bào)告奠定規(guī)范且專業(yè)的第一印象。例如: 項(xiàng)目名稱:[具體繞包機(jī)型號(hào)]繞包機(jī)設(shè)計(jì)報(bào)告 設(shè)計(jì)單位:[單位名稱全稱] 設(shè)計(jì)團(tuán)隊(duì)成員:[設(shè)計(jì)師姓名 1]、[設(shè)計(jì)師姓名 2]…… 完成日期:[年/月/日]
簡(jiǎn)要概括整個(gè)繞包機(jī)設(shè)計(jì)的核心要點(diǎn),包括設(shè)計(jì)目的、主要?jiǎng)?chuàng)新點(diǎn)、關(guān)鍵技術(shù)參數(shù)以及預(yù)期達(dá)到的效果等,字?jǐn)?shù)以 200 - 300 字為宜,方便讀者快速了解報(bào)告的大致內(nèi)容。比如:“本繞包機(jī)設(shè)計(jì)旨在提高包裝效率與質(zhì)量,針對(duì)傳統(tǒng)繞包機(jī)的不足進(jìn)行優(yōu)化改進(jìn)。創(chuàng)新采用[具體新技術(shù)或結(jié)構(gòu)],實(shí)現(xiàn)自動(dòng)化精準(zhǔn)纏繞,關(guān)鍵參數(shù)如纏繞速度可達(dá)[X]層/分鐘,包裝緊密度誤差控制在[X]%以內(nèi),能夠有效降低人工成本并提升產(chǎn)品包裝防護(hù)性。”
闡述繞包機(jī)設(shè)計(jì)的背景和意義,說(shuō)明為什么需要進(jìn)行此次設(shè)計(jì),可提及市場(chǎng)需求、現(xiàn)有設(shè)備的局限性或者行業(yè)發(fā)展趨勢(shì)等方面,引出后續(xù)的設(shè)計(jì)工作。“隨著現(xiàn)代物流與工業(yè)自動(dòng)化的快速發(fā)展,各類產(chǎn)品的包裝需求日益增長(zhǎng)且對(duì)包裝質(zhì)量要求愈發(fā)嚴(yán)格。傳統(tǒng)繞包機(jī)存在操作繁瑣、生產(chǎn)效率低下、包裝效果不穩(wěn)定等問題,已難以滿足企業(yè)高效生產(chǎn)與高品質(zhì)包裝的要求。因此,開展新型繞包機(jī)的設(shè)計(jì)研究具有重要的現(xiàn)實(shí)意義,旨在為企業(yè)提供更先進(jìn)、高效、可靠的包裝解決方案。”
明確列出繞包機(jī)設(shè)計(jì)的具體任務(wù)指標(biāo)和要求,這是設(shè)計(jì)的依據(jù)和目標(biāo)所在,應(yīng)涵蓋功能、性能、尺寸、材質(zhì)等多方面內(nèi)容,表述需精準(zhǔn)具體。例如:
功能要求:具備自動(dòng)上膜、斷膜、纏繞包裹、計(jì)數(shù)等功能,可適應(yīng)不同形狀(圓形、方形)、不同尺寸(最小尺寸[長(zhǎng)×寬×高]mm,最大尺寸[長(zhǎng)×寬×高]mm)產(chǎn)品的包裝需求,能實(shí)現(xiàn)手動(dòng)/自動(dòng)模式切換操作。
性能指標(biāo):纏繞速度在[X] - [X]層/分鐘范圍內(nèi)連續(xù)可調(diào);包裝緊密度均勻,誤差不超過[X]%;運(yùn)行噪音低于[X]分貝;設(shè)備無(wú)故障運(yùn)行時(shí)間不少于[X]小時(shí)。

尺寸限制:設(shè)備整體占地面積不超過[長(zhǎng)×寬]mm2,高度不超過[X]mm,以便于在車間合理布局安置。
材質(zhì)要求:機(jī)身主體采用[材質(zhì)名稱 1]制作,保證結(jié)構(gòu)強(qiáng)度與穩(wěn)定性;關(guān)鍵零部件如轉(zhuǎn)盤、膜架等選用[材質(zhì)名稱 2],確保耐磨性與耐腐蝕性;輸送帶材質(zhì)具備防滑、耐磨特性,符合食品安全標(biāo)準(zhǔn)(若適用)。
設(shè)計(jì)思路闡述 詳細(xì)說(shuō)明設(shè)計(jì)繞包機(jī)時(shí)的整體思考邏輯和技術(shù)路線選擇的依據(jù)。例如:“基于模塊化設(shè)計(jì)理念,將繞包機(jī)劃分為上膜模塊、纏繞模塊、輸送模塊和控制模塊等部分,各模塊相對(duì)獨(dú)立又協(xié)同工作,便于維護(hù)與升級(jí)。從工作原理出發(fā),優(yōu)先考慮采用先進(jìn)的伺服電機(jī)驅(qū)動(dòng)技術(shù)結(jié)合精密的傳感器反饋控制,以確保纏繞動(dòng)作的準(zhǔn)確性和穩(wěn)定性,同時(shí)利用人機(jī)交互界面實(shí)現(xiàn)便捷的參數(shù)設(shè)置與運(yùn)行監(jiān)控。”
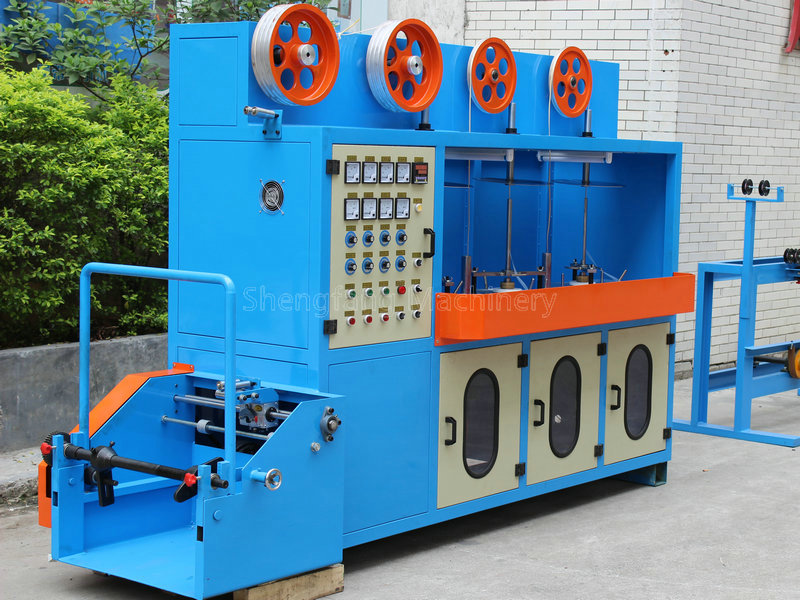
結(jié)構(gòu)設(shè)計(jì)描述 運(yùn)用圖文并茂的方式介紹繞包機(jī)的機(jī)械結(jié)構(gòu)組成,包括各部件的名稱、位置關(guān)系及作用。插入設(shè)備整體結(jié)構(gòu)示意圖和關(guān)鍵部位放大圖,并在圖中標(biāo)注零件序號(hào),在正文中對(duì)應(yīng)說(shuō)明。“如圖 1 所示,繞包機(jī)主要由底座(1)、轉(zhuǎn)盤(2)、膜架(3)、升降立柱(4)、輸送帶(5)等部分組成。底座用于支撐整個(gè)設(shè)備,保證運(yùn)行平穩(wěn);轉(zhuǎn)盤安裝在底座上,通過電機(jī)驅(qū)動(dòng)可帶動(dòng)產(chǎn)品旋轉(zhuǎn)實(shí)現(xiàn)纏繞;膜架負(fù)責(zé)薄膜的安裝與釋放,其位置可根據(jù)產(chǎn)品大小進(jìn)行調(diào)節(jié)……”
對(duì)繞包機(jī)的關(guān)鍵部件進(jìn)行深入剖析,包括設(shè)計(jì)計(jì)算過程、選型理由以及強(qiáng)度或性能校核等內(nèi)容,體現(xiàn)設(shè)計(jì)的科學(xué)性和合理性。例如:
轉(zhuǎn)盤設(shè)計(jì)
設(shè)計(jì)原理:膜架采用可擺動(dòng)式結(jié)構(gòu),通過氣缸驅(qū)動(dòng),能夠根據(jù)產(chǎn)品的直徑自動(dòng)調(diào)整角度,確保薄膜均勻纏繞在產(chǎn)品表面。詳細(xì)描述膜架的運(yùn)動(dòng)機(jī)構(gòu)構(gòu)成和工作原理,并附有運(yùn)動(dòng)簡(jiǎn)圖。
關(guān)鍵部件選型:膜架的擺臂選用鋁合金材質(zhì),重量輕且剛性好;氣缸則選用[氣缸品牌及型號(hào)],其行程和輸出力經(jīng)過精確計(jì)算和匹配,以滿足膜架的動(dòng)作要求。
性能驗(yàn)證:通過實(shí)驗(yàn)測(cè)試,在不同的產(chǎn)品尺寸和纏繞速度下,膜架均能準(zhǔn)確地調(diào)整角度并穩(wěn)定地輸送薄膜,保證了包裝質(zhì)量的一致性。
控制方案概述 說(shuō)明繞包機(jī)控制系統(tǒng)的總體架構(gòu)和控制方式,如采用 PLC 控制、單片機(jī)控制還是其他自動(dòng)化控制系統(tǒng),并闡述其優(yōu)勢(shì)與特點(diǎn)。“本繞包機(jī)選用可編程邏輯控制器(PLC)作為核心控制單元,配合觸摸屏人機(jī)界面、傳感器和執(zhí)行器構(gòu)成一個(gè)完整的自動(dòng)控制系統(tǒng)。PLC 具有可靠性高、編程靈活、抗干擾能力強(qiáng)等特點(diǎn),能夠?qū)崿F(xiàn)對(duì)繞包機(jī)各個(gè)動(dòng)作的精確控制和實(shí)時(shí)監(jiān)測(cè)。”
硬件選型與配置 詳細(xì)介紹控制系統(tǒng)中所使用的主要硬件設(shè)備,包括 PLC 型號(hào)、輸入輸出模塊、傳感器類型及規(guī)格等,并說(shuō)明其選型依據(jù)。例如:“選用[PLC 品牌及型號(hào)]PLC,其具備豐富的輸入輸出接口,能夠滿足繞包機(jī)多個(gè)傳感器信號(hào)采集和執(zhí)行器驅(qū)動(dòng)的需求。配備接近開關(guān)傳感器用于檢測(cè)產(chǎn)品位置,精度可達(dá)[X]mm;光電傳感器用于監(jiān)測(cè)薄膜供應(yīng)情況,響應(yīng)時(shí)間小于[X]ms;同時(shí),選用合適的繼電器和接觸器作為執(zhí)行器的控制元件,確保電氣系統(tǒng)的安全可靠運(yùn)行。”
軟件設(shè)計(jì) 描述控制系統(tǒng)的軟件程序流程和主要功能模塊,如初始化程序、手動(dòng)操作程序、自動(dòng)運(yùn)行程序、故障報(bào)警程序等,可使用流程圖或程序代碼片段輔助說(shuō)明,但需注意代碼的簡(jiǎn)潔性和可讀性。“如圖 2 所示為繞包機(jī)控制程序的主流程圖。初始化程序主要用于設(shè)置系統(tǒng)參數(shù)、檢測(cè)各設(shè)備連接狀態(tài)并進(jìn)行歸位操作;手動(dòng)操作程序允許用戶通過觸摸屏按鈕手動(dòng)控制各個(gè)部件的動(dòng)作,便于設(shè)備調(diào)試和特殊包裝需求的處理;自動(dòng)運(yùn)行程序則按照預(yù)設(shè)的包裝工藝參數(shù)自動(dòng)完成整個(gè)繞包過程;故障報(bào)警程序能夠?qū)崟r(shí)監(jiān)測(cè)設(shè)備的運(yùn)行狀態(tài),當(dāng)出現(xiàn)異常情況時(shí)及時(shí)發(fā)出聲光報(bào)警提示,并在觸摸屏上顯示故障信息,方便維修人員快速排查問題。”
裝配流程說(shuō)明 按順序詳細(xì)介紹繞包機(jī)的裝配步驟和方法,包括各部件的安裝順序、連接方式以及裝配過程中的注意事項(xiàng),可插入裝配過程的照片或視頻截圖增強(qiáng)直觀感。“首先將底座放置在平穩(wěn)的地面上,使用地腳螺栓固定。然后將轉(zhuǎn)盤安裝在底座上,通過定位銷和緊固螺栓確保轉(zhuǎn)盤與底座的同心度。接著依次安裝膜架、升降立柱和輸送帶等部件……在裝配過程中,要嚴(yán)格按照裝配工藝要求操作,注意各零件的方向和緊固力度,避免因裝配不當(dāng)導(dǎo)致的設(shè)備運(yùn)行故障。”
調(diào)試方法與步驟 闡述調(diào)試?yán)@包機(jī)的目的和具體內(nèi)容,如設(shè)備外觀檢查、電氣系統(tǒng)測(cè)試、運(yùn)行參數(shù)調(diào)整等,并提供詳細(xì)的調(diào)試步驟和合格標(biāo)準(zhǔn)。“調(diào)試前先對(duì)繞包機(jī)的外觀進(jìn)行檢查,確保各部件安裝牢固、無(wú)明顯損傷和異物。然后進(jìn)行電氣系統(tǒng)測(cè)試,檢查電源接線是否正確、各電氣元件是否正常工作。接下來(lái)進(jìn)行空載運(yùn)行調(diào)試,啟動(dòng)設(shè)備后觀察轉(zhuǎn)盤、膜架和輸送帶等部件的運(yùn)動(dòng)是否平穩(wěn)、有無(wú)異常噪聲和振動(dòng)。逐步加載至額定負(fù)載進(jìn)行滿載運(yùn)行調(diào)試,調(diào)整纏繞速度、包裝緊密度等參數(shù)至設(shè)計(jì)要求……調(diào)試完成后,連續(xù)運(yùn)行設(shè)備[X]小時(shí),記錄設(shè)備運(yùn)行數(shù)據(jù),各項(xiàng)性能指標(biāo)均符合任務(wù)要求后方可視為調(diào)試合格。”
測(cè)試項(xiàng)目與方法 明確列出對(duì)繞包機(jī)進(jìn)行的性能測(cè)試
Copyright ? 2009 All Rights Reserved. 備案號(hào):粵ICP備17125773號(hào)
服務(wù)熱線